小型装置・ディスペンサーの精度を上げる高精度スイッチを徹底解説

目次
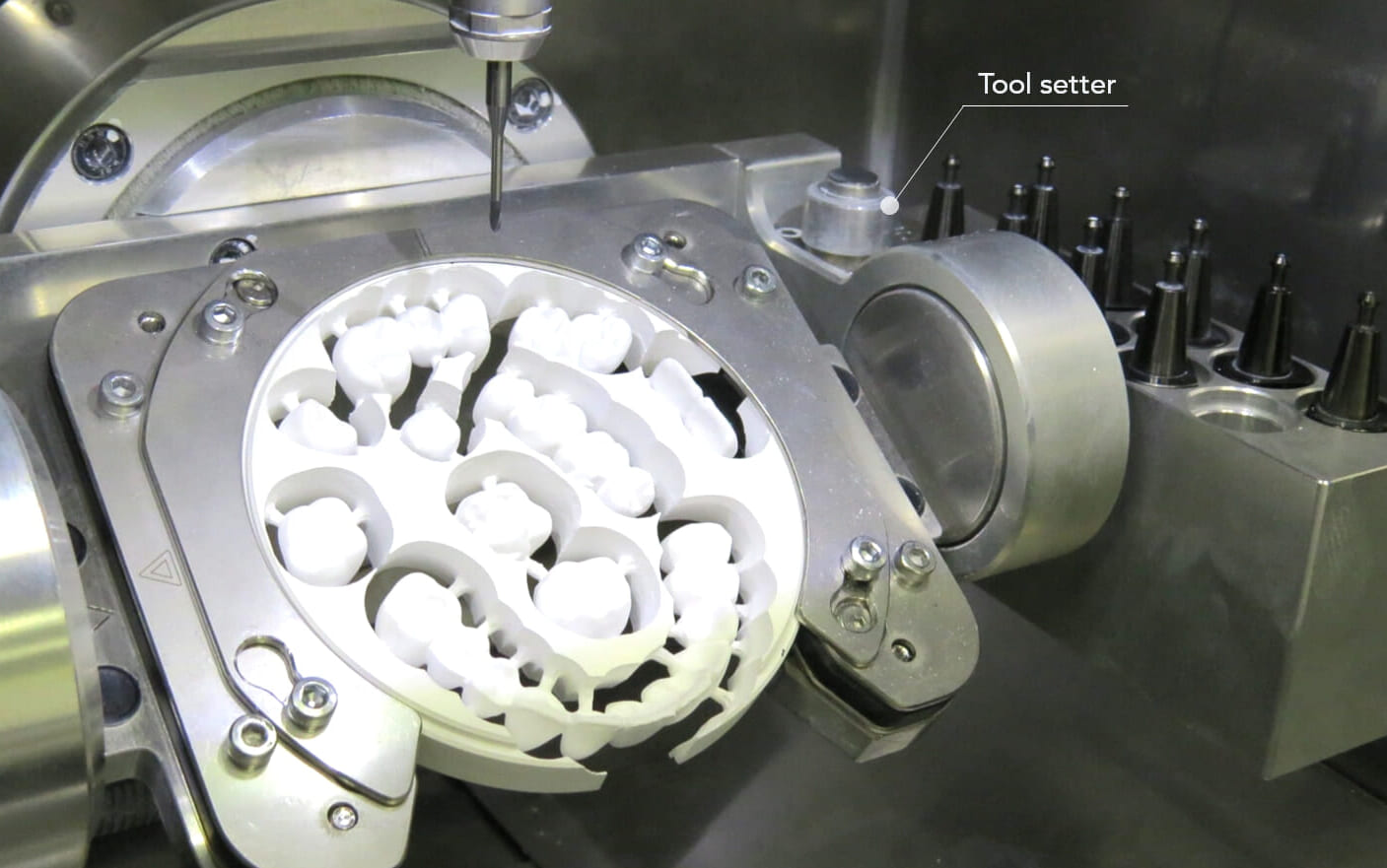
小型生産設備・ミリングマシンの原点出し
卓上・小型の生産設備やディスペンサー、3Dプリンタなどでもツール、ノズルの原点出しが精密な動作を制御する重要な課題となっています。
本記事では、主軸の原点出しに関する課題を解決するセンサと事例をご紹介いたします。
機械座標とのずれの原因と課題
小型ミリングマシン|熱変異・摩耗
小型ミリングマシンの場合は、ワークが小さく、小径ツールを使用するケースがほとんどです。
そのため、熱変位だけでなく『ツールの摩耗や折れ』が発生します。
これらを検出しないと加工不良の原因となり高精度加工は実現されません。


3Dプリンタ・ディスペンサー|自己発熱による熱変異
設備の自己発熱や朝と夜の温度差などの環境要因による熱膨張等が発生し、ノズルの先端位置が
機械座標上と数ミクロンの誤差でズレてしまうケースが発生します。
精密な動作が伴う動作プロセスでは数ミクロンのずれが加工不良の原因となります。
機械座標のズレを補正する方法
・熱膨張・熱変位
・小径ツールの摩耗・折れ検知
などの課題は位置決めタッチスイッチP21シリーズで検出可能です。
P21シリーズは、小型タッチスイッチです。
ミクロンレベルの熱変位や摩耗量の変化も繰り返し精度±0.5μmの精度で確実に検知します。
高精度、低価格、コンパクトなサイズで、すでに小型の産業用ロボットの座標原点出し用途で多数採用されています。

位置決めタッチスイッチ『P21シリーズ』5つの特徴
P21シリーズは世界40ヵ国、累計30万台以上の販売実績があり、世界中のメーカー様に採用されています。
- 繰り返し精度0.5μmの高精度タッチスイッチ
- 低価格1万円~2万円 ※標準カタログ品に限る
- コンパクトで取付スペースの狭い場所でも取付簡単
- IP67の保護構造で水や油、クーラント、切粉が飛び散る悪環境に対応
本製品はカスタマイズにも対応しています。ご希望の方はお問い合わせフォームよりご連絡ください。

選べるカスタマイズ
以下項目はカスタマイズが可能です。詳細はカタログをご参照下さい。
・ケーブルの長さ・方向・保護
・動作時のLED有り無し
・接触力
・コンタクト(検知接触面)サイズ・形状の変更
・トランジスタ出力
・エアパイプ
【事例】自動はんだ付けロボットの課題とは?
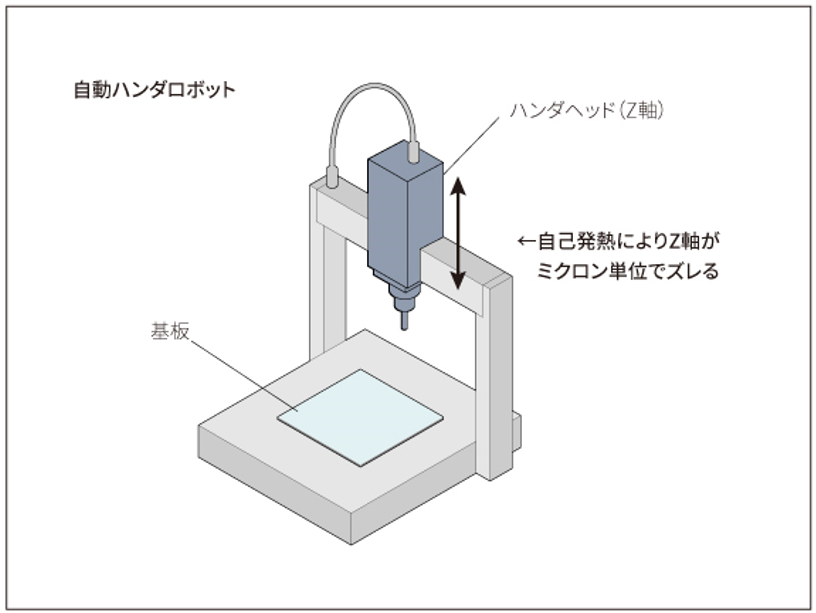
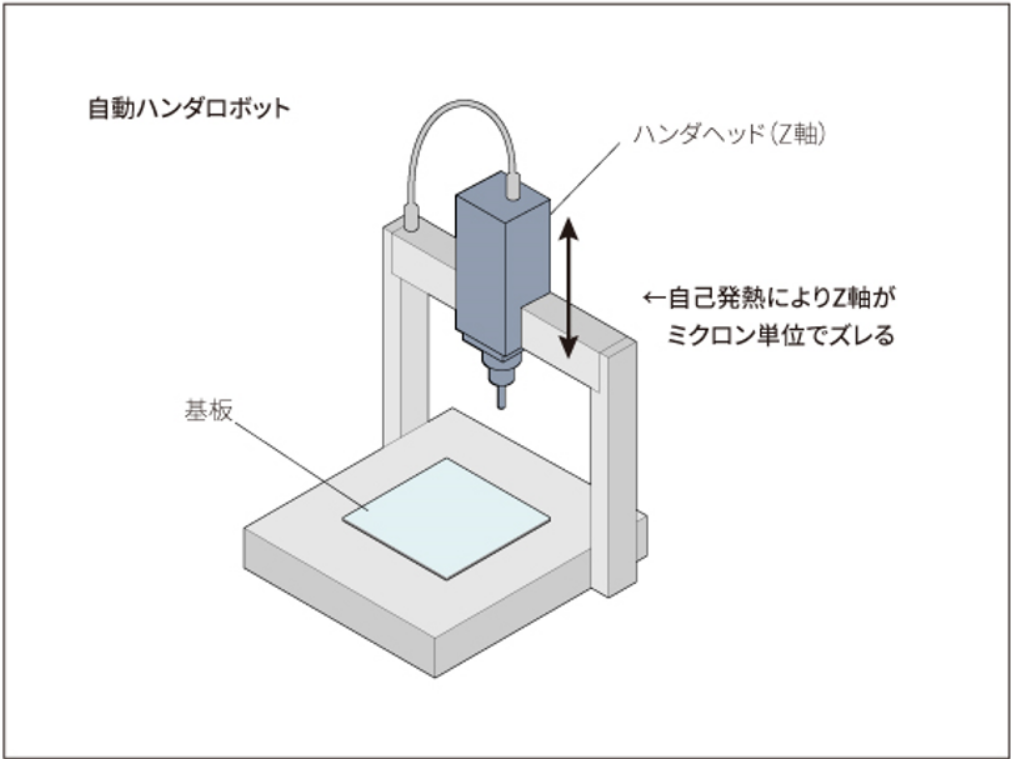
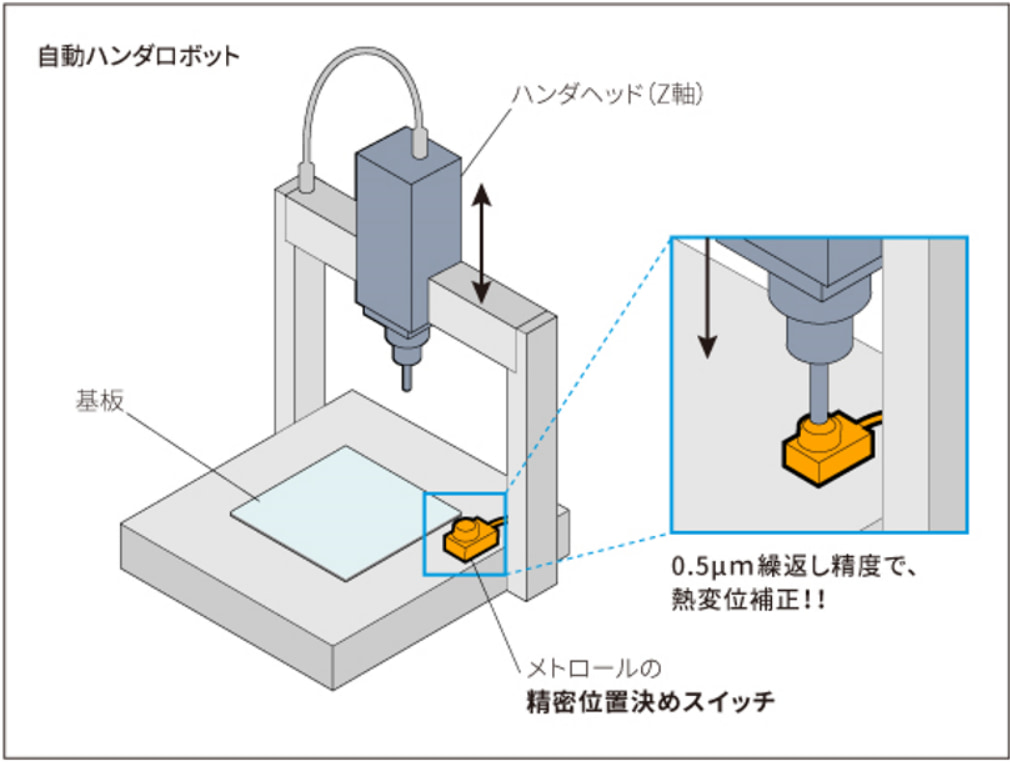
自動はんだロボットの課題
自動ハンダロボットのハンダヘッドのZ軸が、
ロボットの自己発熱によりミクロン単位でズレてしまい、課題となっていました。
ハンダヘッドと基板の高さ位置がズレると、ハンダを正確に塗布することができず、不良品の原因となります。
Z軸の位置を、高精度で検出することができるセンサをお探しのところ、お問い合わせいただきました。
課題のポイント
ハンダヘッドのZ軸の熱変位により、ハンダ不良が発生、歩留まりが低下
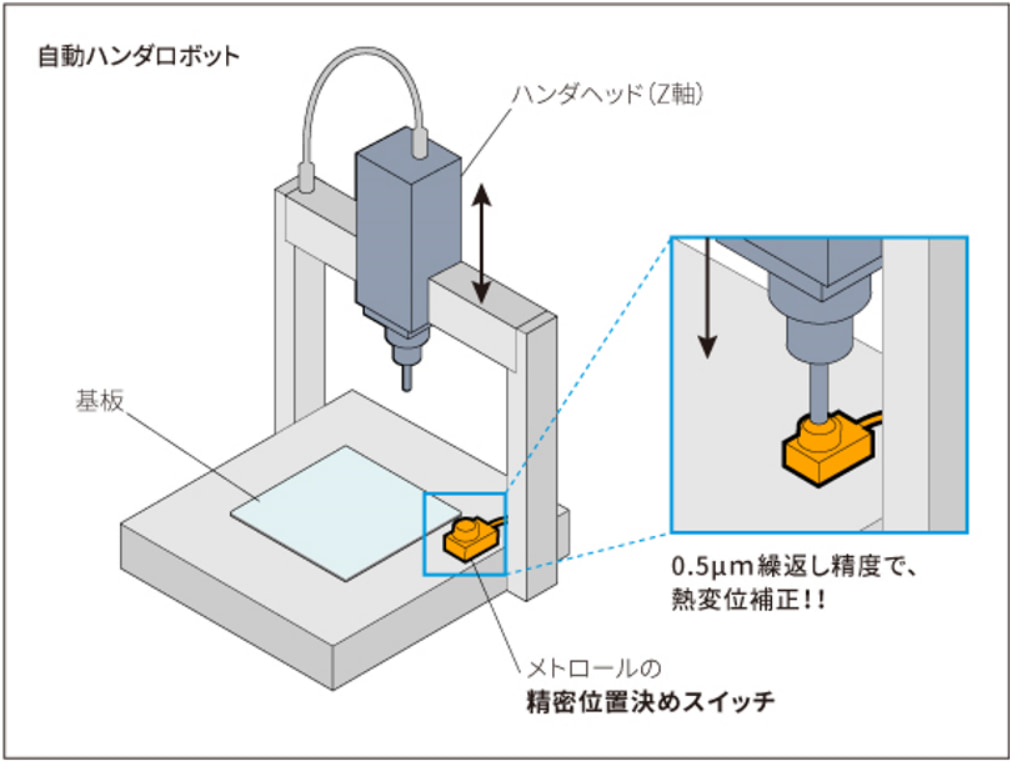
解決方法|タッチスイッチでノズルの原点出し
本事例では位置決めタッチスイッチP21シリーズを設備に搭載し、ハンダヘッドの原点出しを高精度で行いました。
これにより、0.5μmの繰返し精度でZ軸の熱変位を補正。
P11シリーズは機械式の接点構造のため、精度が高く、正確なハンダ塗布が実現されました。
位置決めタッチスイッチ導入メリット
高精度位置決めタッチスイッチを搭載したことで以下のメリットが実現されました。
- ハンダヘッドのZ軸の熱変位を、0.5μm精度で補正
- 正確なハンダ塗布が実現、歩留まりの向上
【動画あり】導入設備のご紹介
位置決めタッチスイッチP11シリーズが導入された設備をご紹介します。
事例1:基板実装用マウンター
細かい部品と正確な動作が要求されるため、位置決めタッチスイッチを搭載しています。
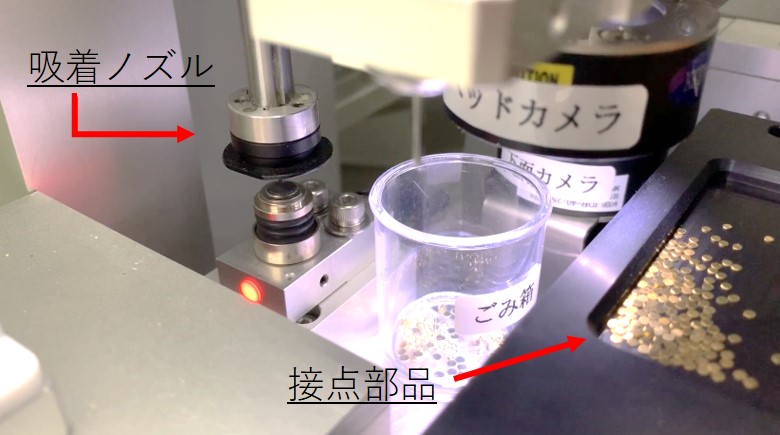
■動作プロセス
STEP1:位置決めタッチスイッチで吸着ノズルの原点出しを行う
STEP2:接点部品を吸着して基板に配置していく


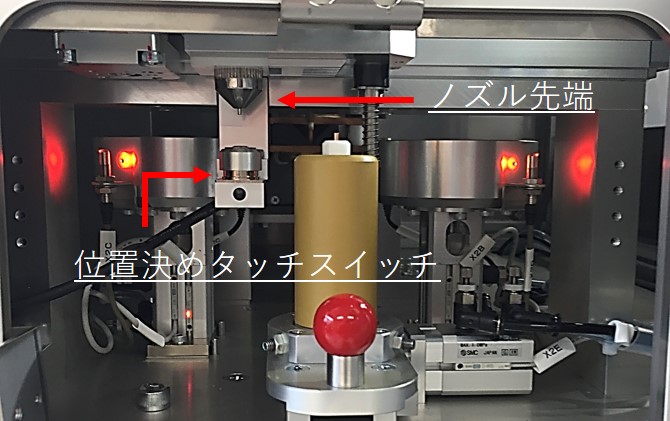
事例2:ディスペンサー|自動ロウ付けロボット
ロウ付けの材料である『銀ろう』充填した注射器の先端ノズルからロウを射出するディスペンサーです。
少量のロウをピンポイントで塗布する必要があるため、高い精度で先端位置の位置決めが必要となります。
ノズル先端部の原点出しに位置決めタッチスイッチP21を使用しています。



関連資料のダウンロード
《お問い合わせ》
使用方法に関する質問や、製品のカスタマイズのご要望については、当社のエンジニアから回答させていただきます。
用途、使用環境、検出ワークなどの情報が明確ですと、具体的なご提案ができるかと思います。
以下のお問い合わせフォームよりご連絡ください。
![高精度小型ツールセッター[P21シリーズ]](https://www.metrol.co.jp/wp-content/uploads/2020/04/MET_D_3_DDBP_DULD-2-400x400.jpg)